×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
欢迎访问制造业自动化官方网站!
ISSN 1009-0134
CN 11-4389/TP
主管:中国机械工业联合会
主办:北京机械工业自动化研究所有限公司
中国科技核心期刊
中国期刊方阵双效期刊
机械行业优秀期刊
2025年, 第47卷, 第12期
刊出日期:2025-12-25
Toggle navigation
更多内容请点击
首页
期刊简介
编委会
投稿指南
期刊订阅
在线期刊
最新录用
当期目录
过刊浏览
阅读排行
下载排行
引用排行
E-mail Alert
RSS
常见问题
广告合作
联系我们
English
图/表 详细信息
自动驾驶多源车身信息功能设计与试验
徐晓林
制造业自动化, 2024, 46(
8
): 202-210. DOI:
10.3969/j.issn.1009-0134.2024.08.030
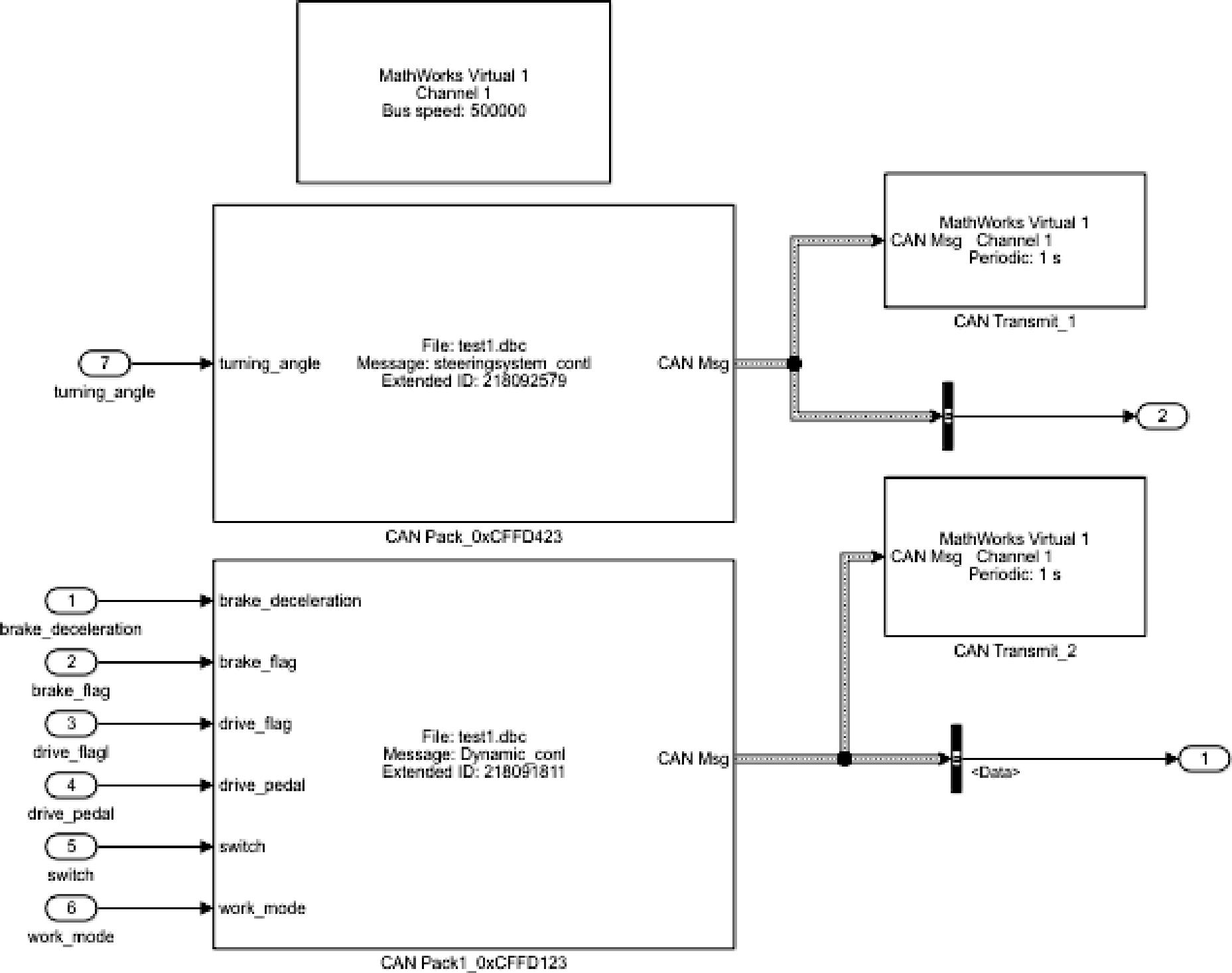
图8
动力控制
CAN
组包发送数据组件模型
本文的其它图/表
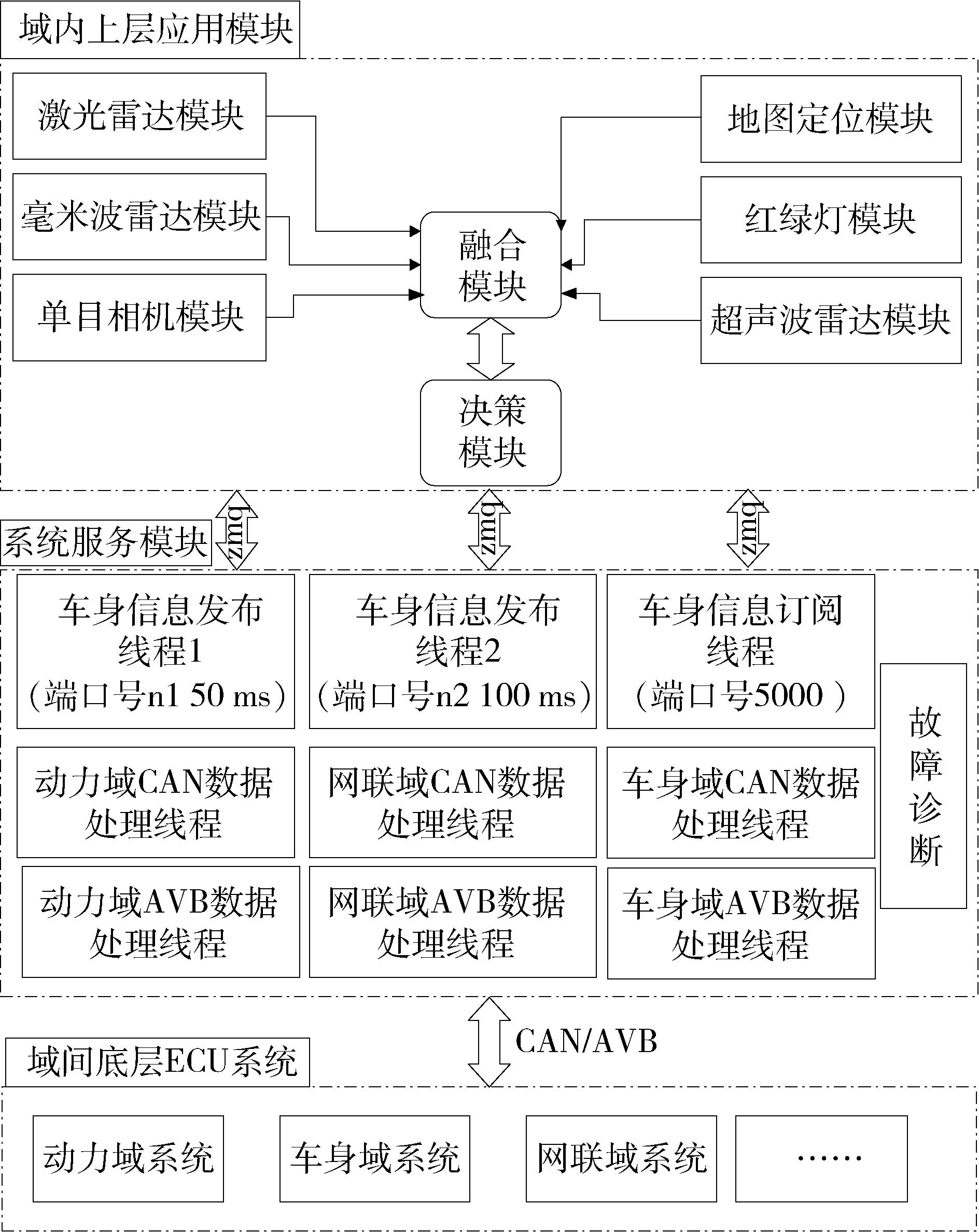
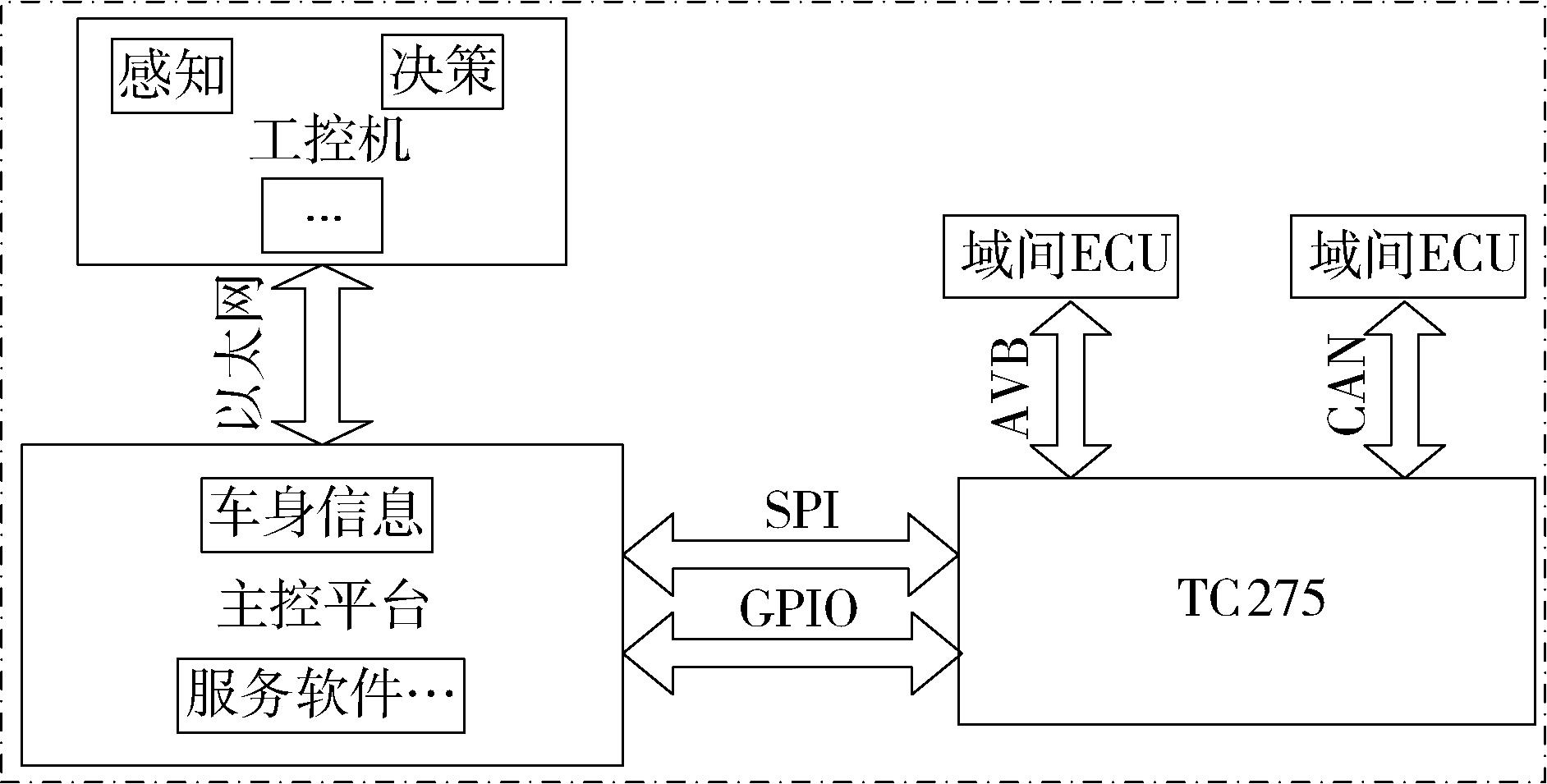
图1
某一无人驾驶车辆信息分布式并发通信框架
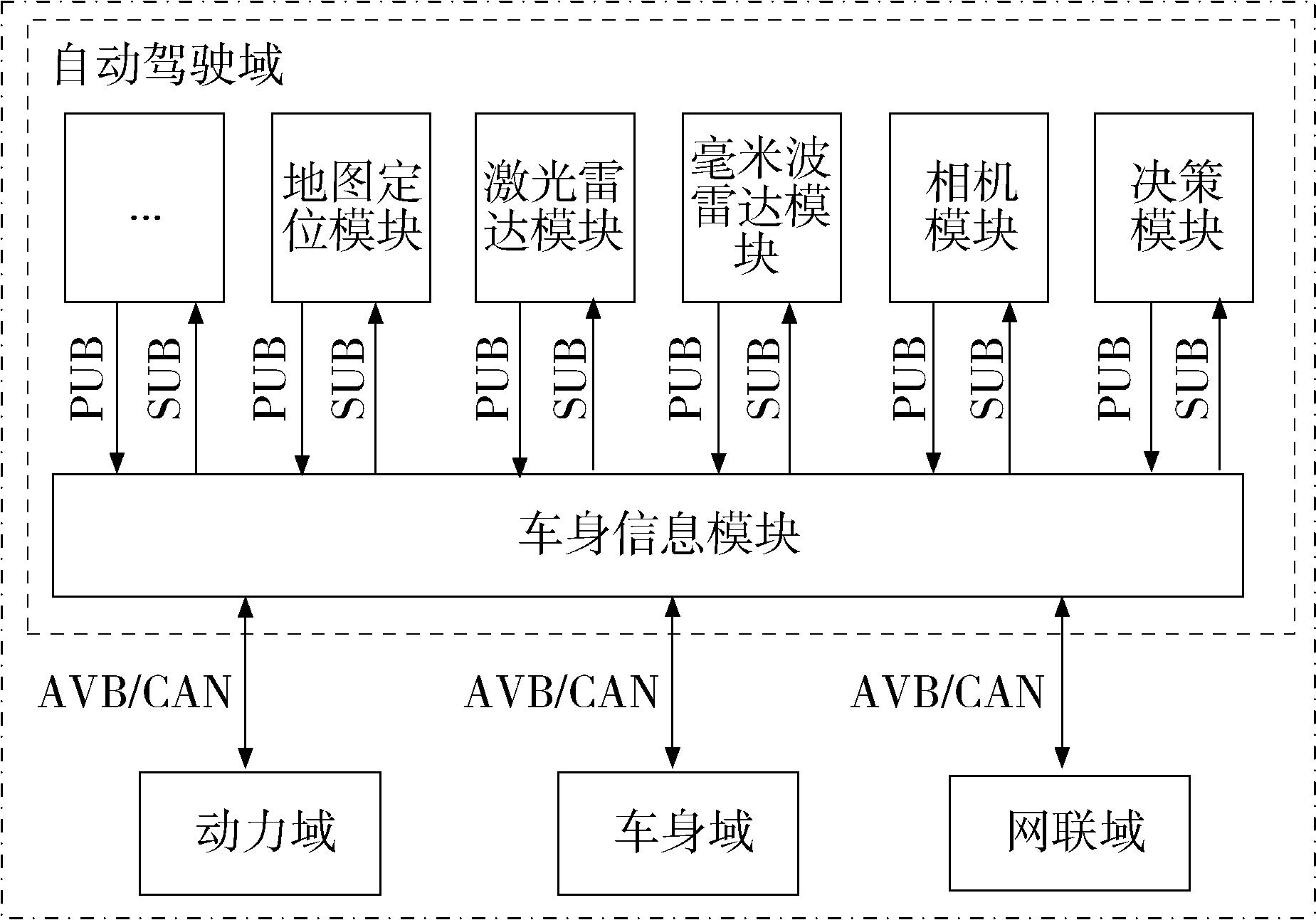
图2
多源车身信息数据流向图
表1
Ei
(
t
)
和
Rm
(
t
)事件
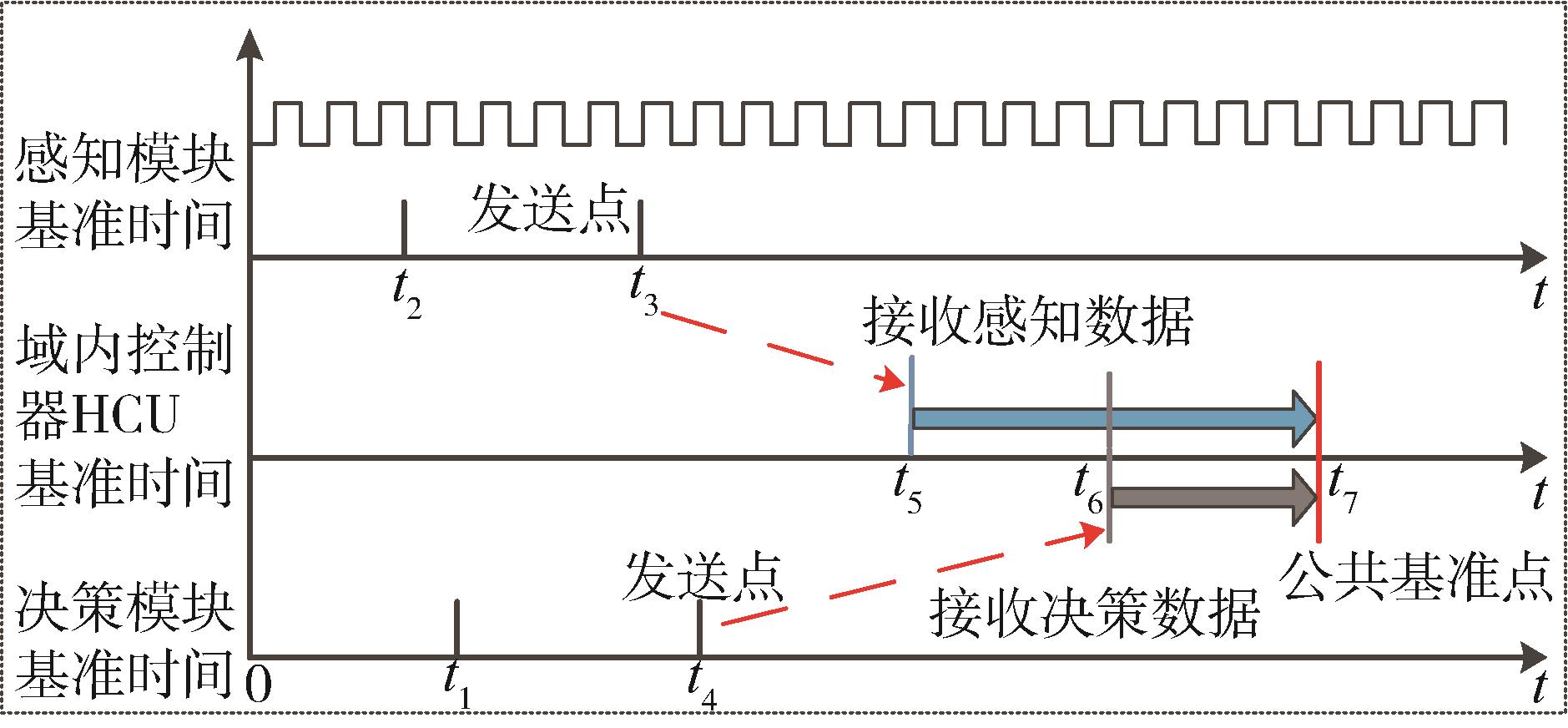
图3
域内模块时钟同步机制
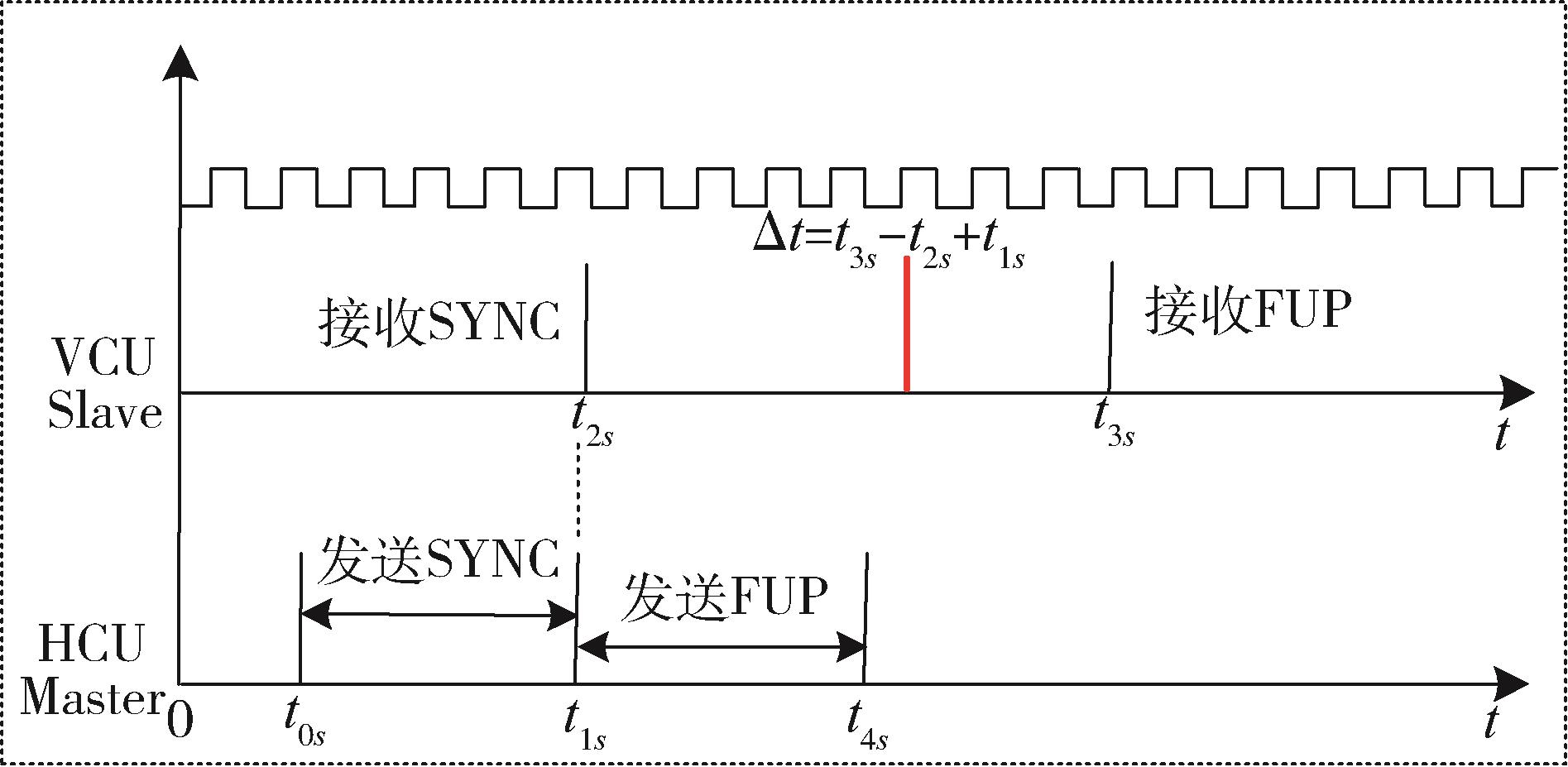
图4
域间
ECU
的
CAN
时钟同步机制
表2
Tsync
协议格式
图5
车身信息软件整体功能流程图
表3
车身状态信息软件
SWC
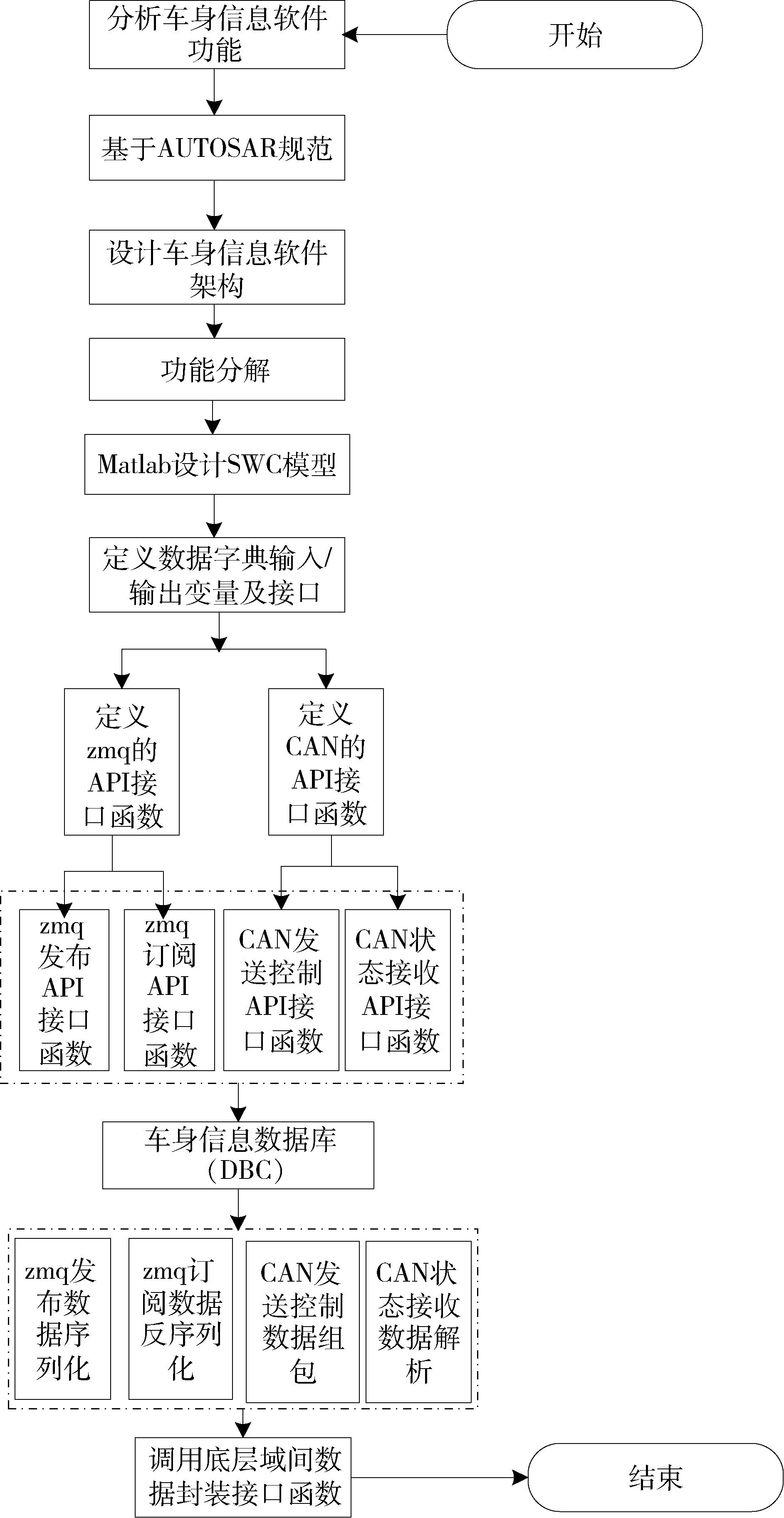
图6
车身状态信息软件模型
表4
车身状态子系统发布的部分车身信息数据
表5
车辆控制信息软件组件
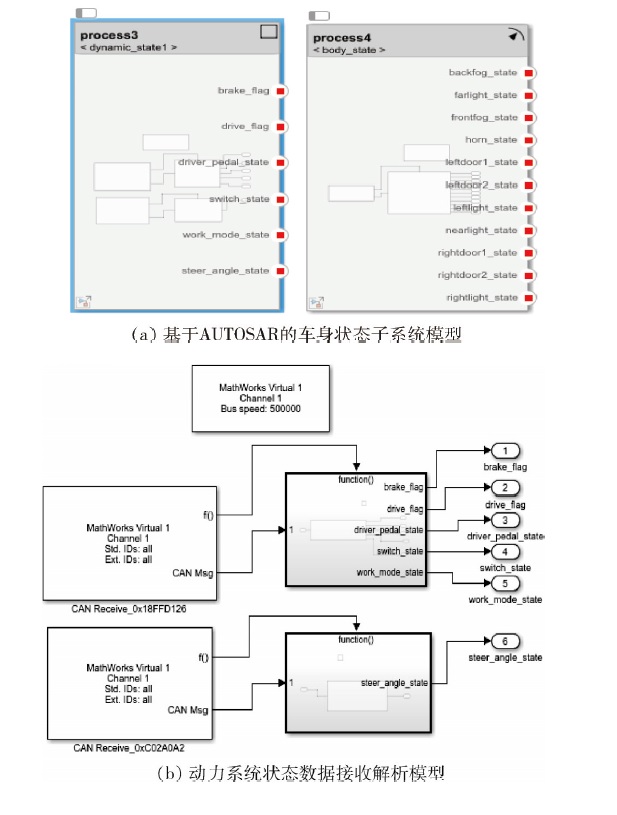
图7
车辆控制子系统的
AUTOSAR
模型
图9
多源车身信息测试平台连接
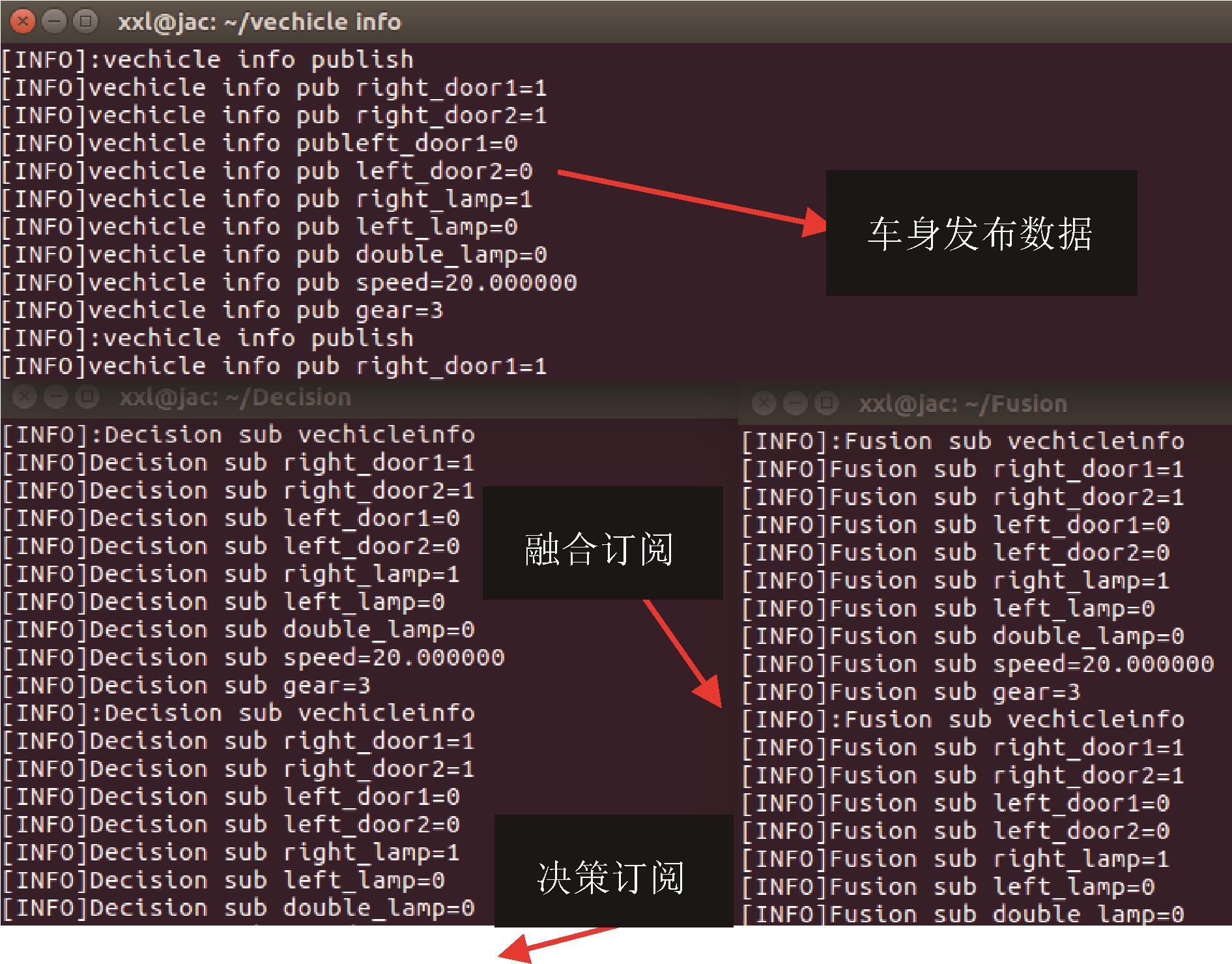
图10
不同应用节点订阅的车辆状态信息
表6
不同节点
SUB
信息与车身控制子系统
PUB
信息对比测试
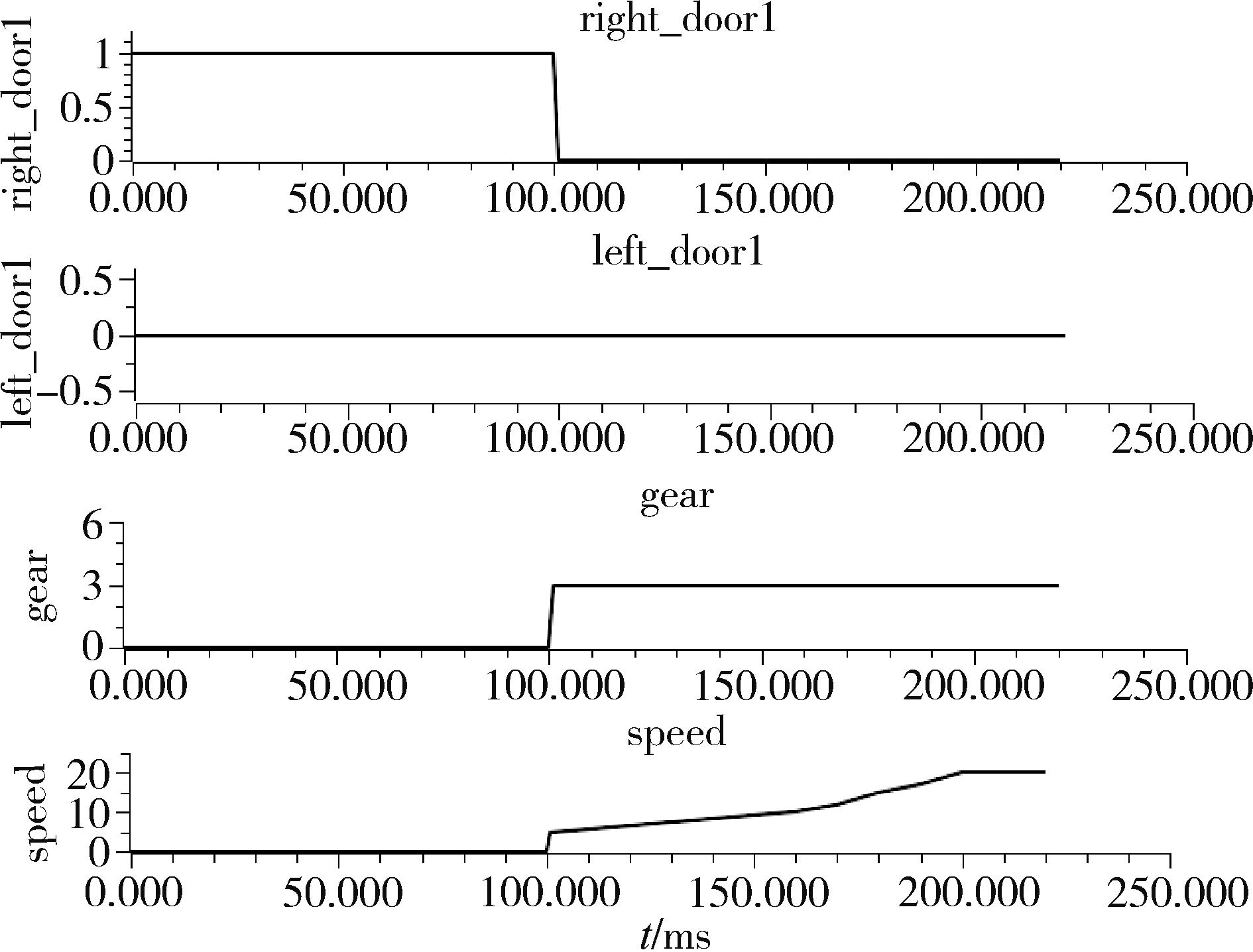
图11
动力域与车身域采集的部分
CAN
状态数据
表7
发布节点测试控制数据信息
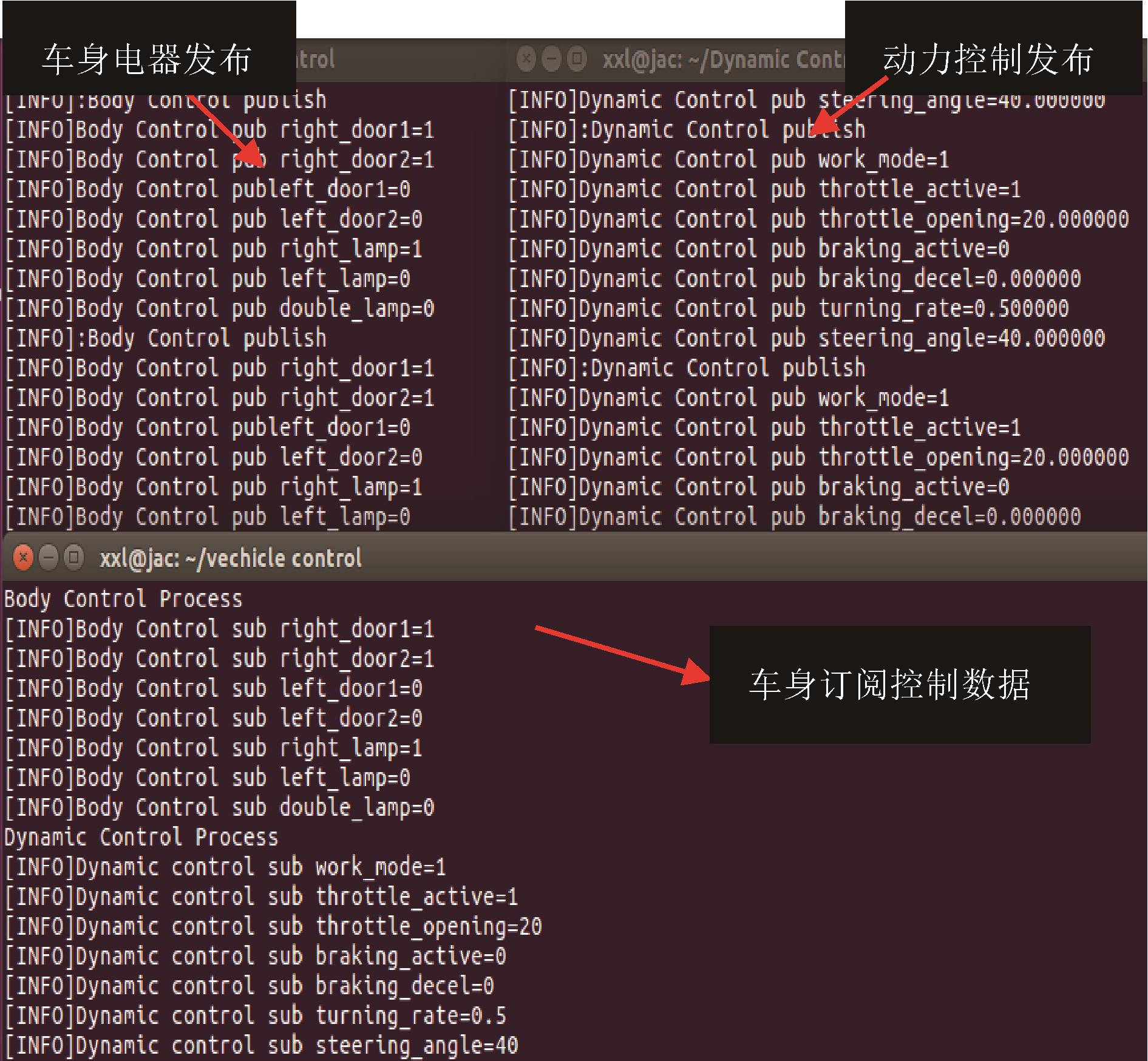
图12
车身模块节点订阅的车身控制信息
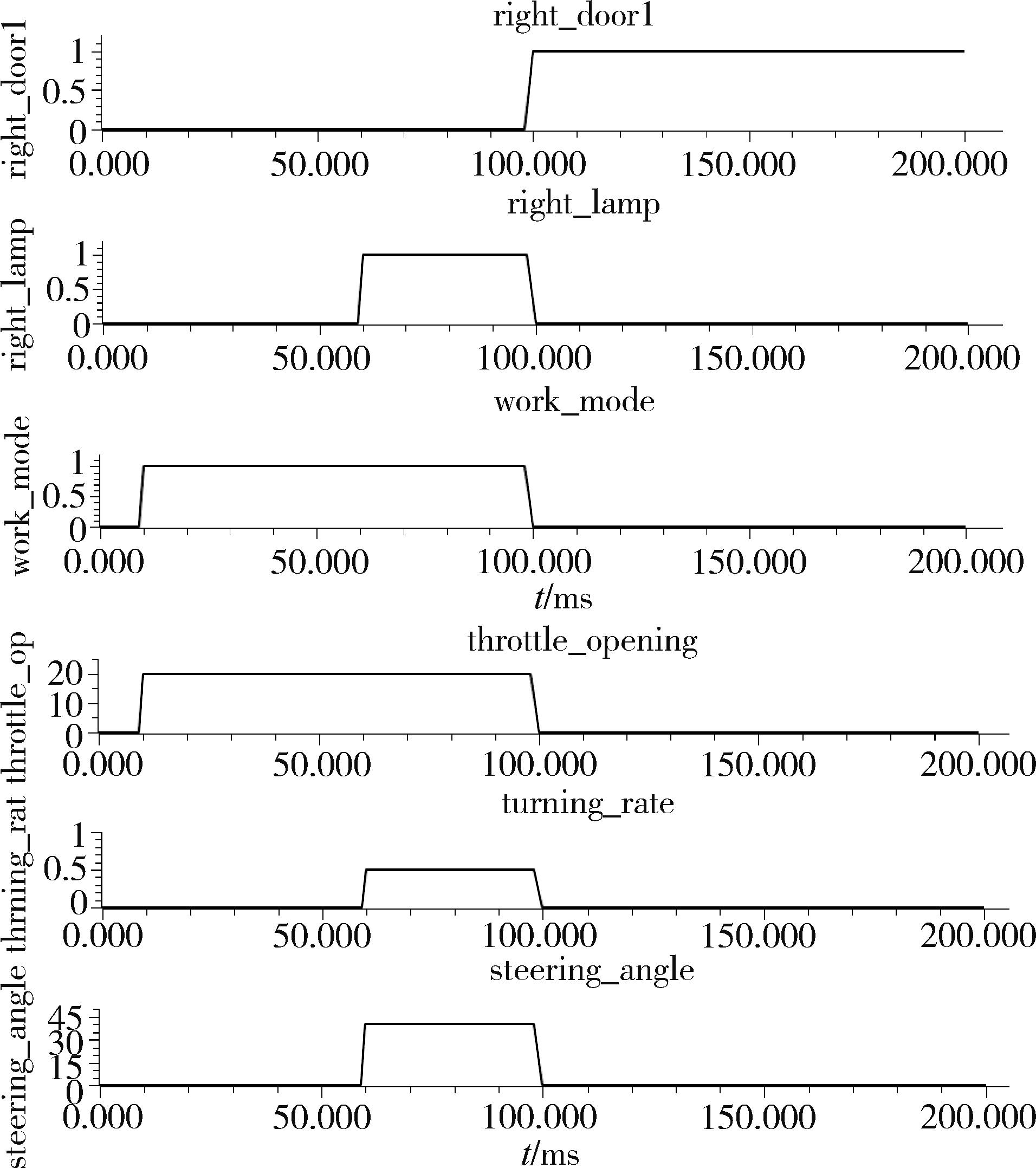
图13
动力域与车身域采集的部分
CAN
控制数据